All images on this webpage are courtesy of NASA, JPL-Caltech, ArtCenter, the Data to Discovery Program, and the JPL Hydrology and Simultaneous Localization and MappingTeams.This work originated from the 2022 JPL-Caltech-ArtCenter Data to Discovery Program. The research was carried out by the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration (80NM0018D0004). Authors include: Racquel Fygenson, Isabel Li, and Kazi Jawad. In collaboration with: Robert G Deen, Mauricio A Hess Flores, and Francois Ayoub. Under the mentorship of: Scott Davidoff, JPL/NASA, Maggie Hendrie, ArtCenter, Hillary Mushkin, Caltech, and Santiago Lombeyda, Caltech + ArtCenter
VECTOR:
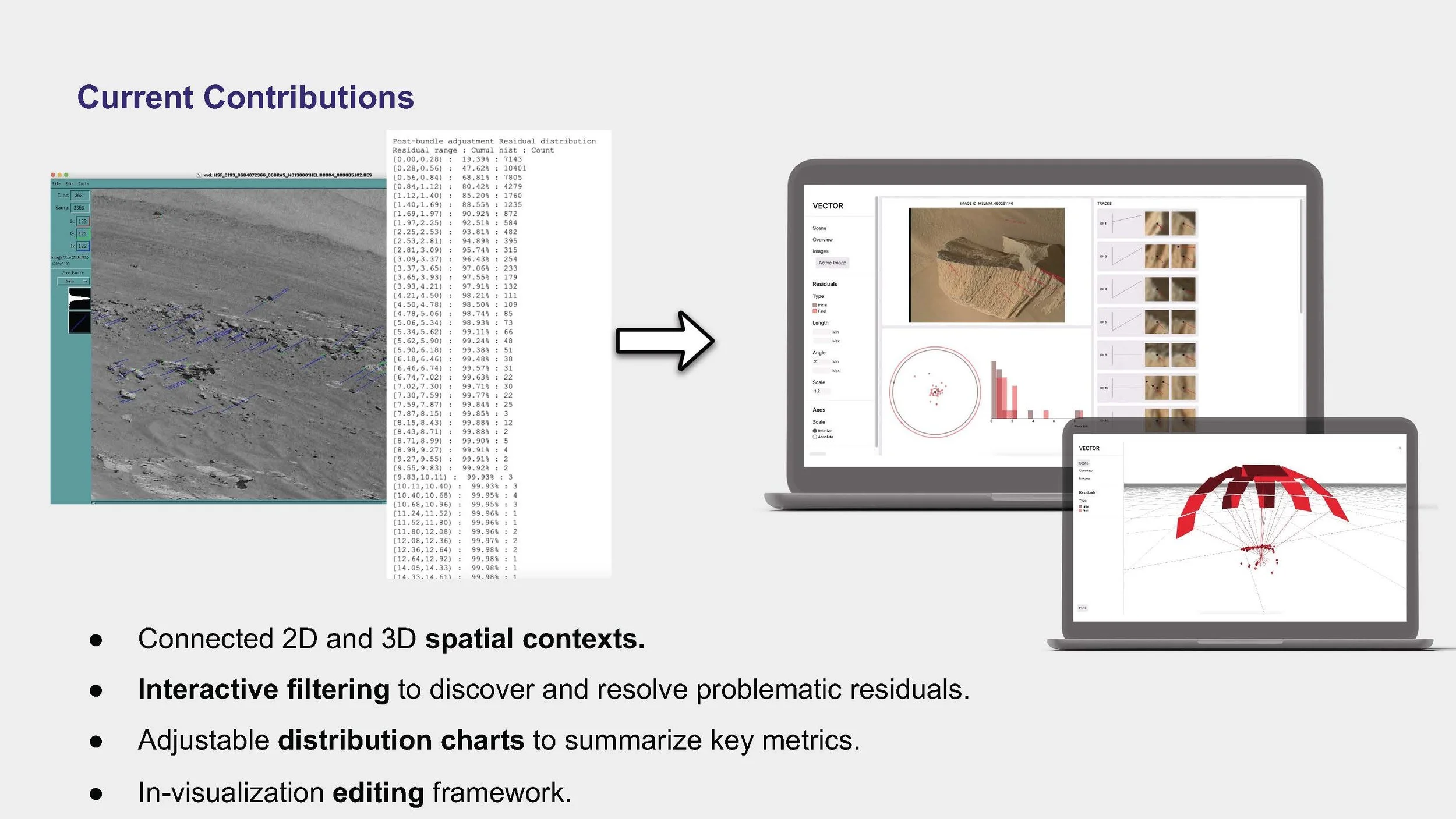
Visualization and Editing of Camera Tie-points, Orientation, and Residuals
Developed through the NASA JPL & CalTech Data to Discovery initiative
My work with NASA’s Jet Propulsion Lab rendered three different visualization tools, each designed and developed specifically to address the needs of three different JPL teams. VECTOR was my team’s answer to JPL’s Simultaneous Localization And Mapping (SLAM) team, who parse through hundreds of error vectors to optimize the stitching of 2D images taken by vehicles on Mars into a 3-dimensional mesh rendering of the surface of Mars.

Team
Development: Kazi Jawad
Design: Isabel Li & myself
In collaboration with
Mauricio Hess-Flores, Robert Deen, and François Ayoub
Under the mentorship of
Santiago Lombeyda, Maggie Hendrie, Hillary Mushkin, and Scott Davidoff
What does VECTOR do?

SLAM scientists need ways to quickly parse through hundreds of images with thousands of tiepoints that are used to create 3D mesh constructions of the surface of Mars. These scientists need to be able to find and remove images that are low quality, edit incorrect tiepoints, and adjust incorrectly interpreted camera positions.
VECTOR is a 5-view tool that allows SLAM scientists to do just that.
For more information, check out the abbreviated final deck below.