All images on this webpage are courtesy of NASA, JPL-Caltech, ArtCenter, the Data to Discovery Program, and the JPL Hydrology and Simultaneous Localization and MappingTeams.This work originated from the 2022 JPL-Caltech-ArtCenter Data to Discovery Program. The research was carried out by the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration (80NM0018D0004). Authors include: Racquel Fygenson, Isabel Li, and Matt-Heun Hong. In collaboration with: Kristopher Wehage, Jeng Yen, and Garrett Johnson. Under the mentorship of: Scott Davidoff, JPL/NASA, Maggie Hendrie, ArtCenter, Hillary Mushkin, Caltech, and Santiago Lombeyda, Caltech + ArtCenter
GRIT:
Graphical Route Interpretation Tool
Developed through the NASA JPL & CalTech Data to Discovery initiative
My work with NASA’s Jet Propulsion Lab rendered three different visualization tools, each designed and developed specifically to address the needs of three different JPL teams. GRIT was my team’s answer to JPL’s Rover Operations team who need to evaluate hundreds of Monte Carlo simulations of possible paths of NASA rovers on Mars and their probable outcomes.
For more information, check out the abbreviated final deck below.

D2D Summer 2022 Interns in JPL’s Mars Yard
Team
Development: Matt-Heun Hong
Design: Isabel Li & myself
In collaboration with
Kristopher Wehage, Jeng Yen, and Garrett Johnson
Under the mentorship of
Santiago Lombeyda, Maggie Hendrie, Hillary Mushkin, and Scott Davidoff
What does GRIT do?

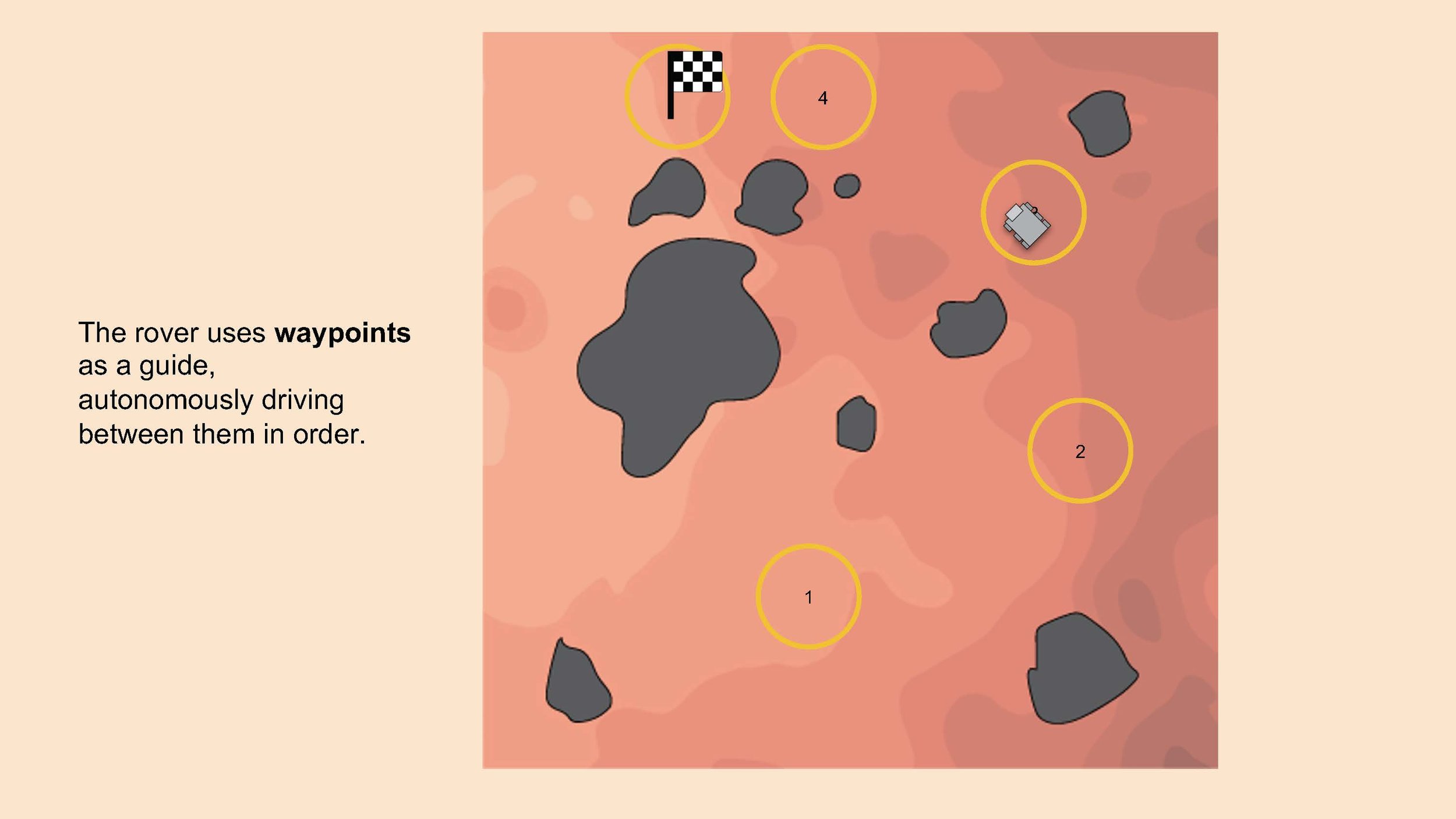
The Rover Operations team is responsible for deciding the movement commands that are uplinked to Mars rovers. To ensure the safety of these Mars missions, Rover Operations undergoes a thorough review of the best possible guiding waypoints to instruct awaiting vehicles to target, juggling both the safety of the marscrafts and the goals of scientific missions.
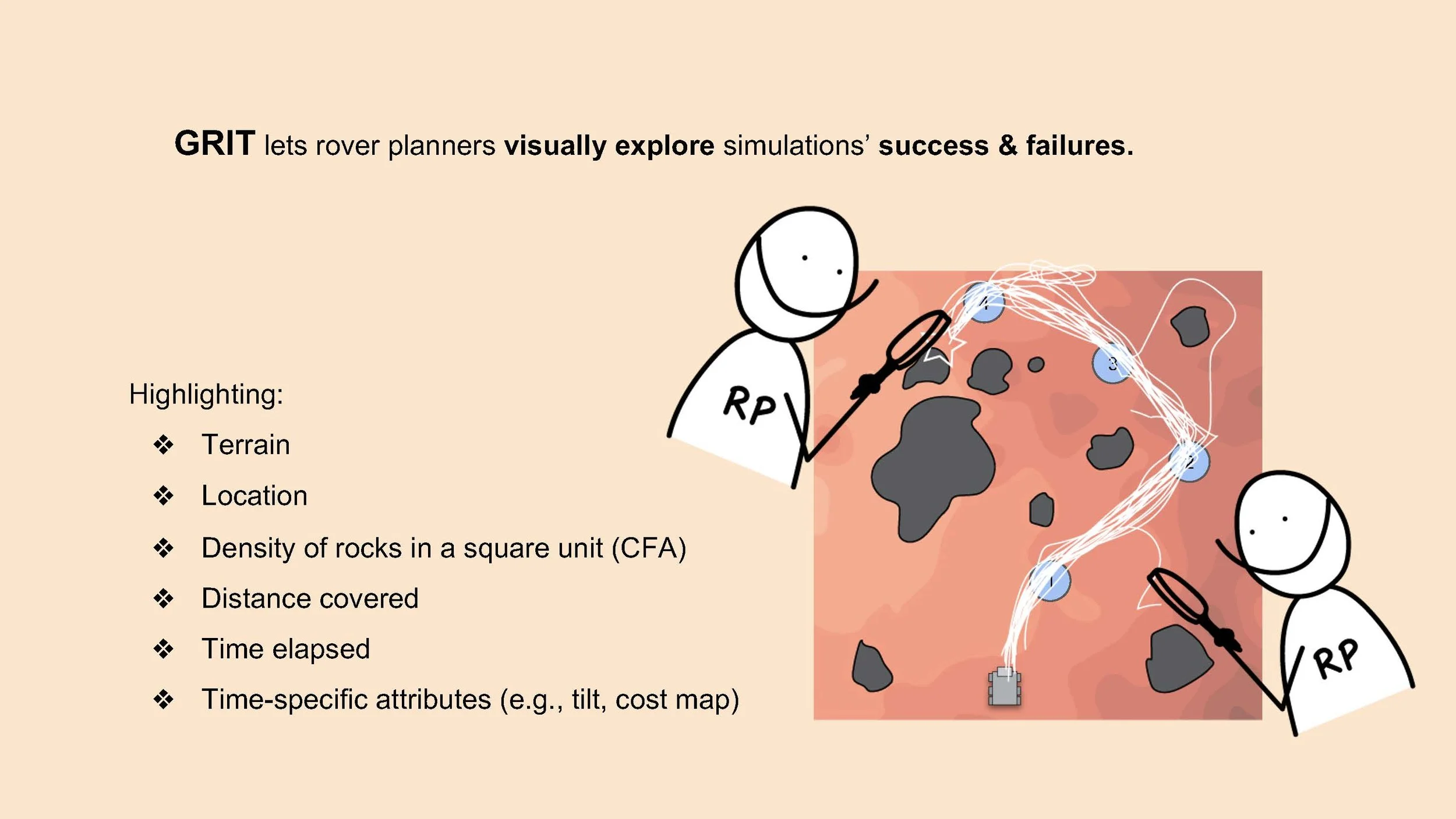
Part of this review includes running a series of Monte Carlo simulations on simulated 3D renderings of Mars’s surface to anticipate any problems that a rover may run into.
GRIT provides an intuitive way to evaluate these MC simulations, by visualizing path complexities and location data in a way that simple summary statistics (see right) fail to communicate.